|
|
These are the remainings of the _old_ roboshock pages.
The new pages can be found here
|
Da ich das roboshock-Projekt nur auf Hobby-Ebene betreibe, stehen mir nur sehr
begrenzte zeitliche Ressourcen zur Verfügung. Hier ein Blick auf die zähe Entwicklung:
Mitte 2009:
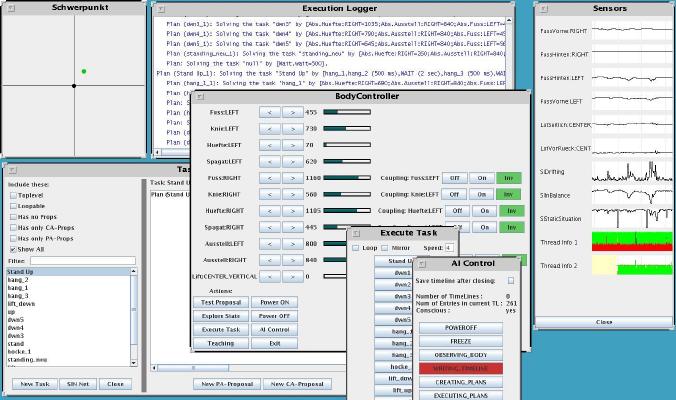
- Die SW beginnt allmählich, zu leben. Um zu verstehen, was intern vor sich geht, kam
der Execution Logger und der neue Sensor/State/Thread-View dazu.
 Ende 2008:
- Ich hatte die Idee, dass die AI als Lern-Input auch Bewegungen von Charakteren
aus virtuellen Welten abgucken könnte, zumal z.B. das Format zur Kodierung von
Bewegungsfolgen in second life öffentlich zugänglich ist, und dort ein sehr
reiches Repertoire an Bewegungen existiert.
Mitte 2008:
- Geänderte Datenzugriffs-Philosophie - alles liegt im Speicher. Die DB wird
nur noch für die Langzeit-Persistenz eingesetzt.
- Architektur-Änderungen (u.a. Proposals statt Examples)
- Neuer TeachingPlan-Editor (entsprechend den Architektur-Änderungen)
- Entschluss, die SW bis auf weiteres als closed source zu entwickeln
Mitte 2007:
- Speichern von Plänen mit javax.persistence und Hibernate
- TeachingPlan-Editor (erste Variante)
Mitte 2006:
- RS-Architektur um Umgang mit Zeit und Einführung der StateProvider erweitert.
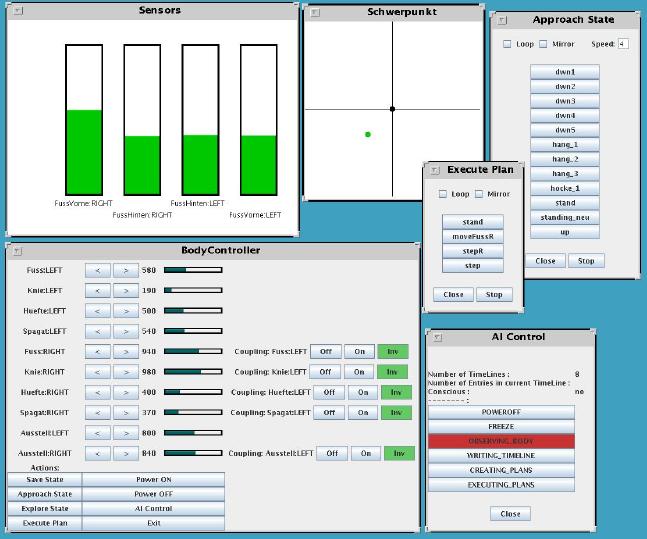
- Erweiterung der SW um verschiedene "Bewustseins-Zustände" (AI-Control)
- Erste SW-Version mit GUI: (im Bild eine spätere Version)
Ende 2008:
- Ich hatte die Idee, dass die AI als Lern-Input auch Bewegungen von Charakteren
aus virtuellen Welten abgucken könnte, zumal z.B. das Format zur Kodierung von
Bewegungsfolgen in second life öffentlich zugänglich ist, und dort ein sehr
reiches Repertoire an Bewegungen existiert.
Mitte 2008:
- Geänderte Datenzugriffs-Philosophie - alles liegt im Speicher. Die DB wird
nur noch für die Langzeit-Persistenz eingesetzt.
- Architektur-Änderungen (u.a. Proposals statt Examples)
- Neuer TeachingPlan-Editor (entsprechend den Architektur-Änderungen)
- Entschluss, die SW bis auf weiteres als closed source zu entwickeln
Mitte 2007:
- Speichern von Plänen mit javax.persistence und Hibernate
- TeachingPlan-Editor (erste Variante)
Mitte 2006:
- RS-Architektur um Umgang mit Zeit und Einführung der StateProvider erweitert.
- Erweiterung der SW um verschiedene "Bewustseins-Zustände" (AI-Control)
- Erste SW-Version mit GUI: (im Bild eine spätere Version)
 Mitte/Ende 2005:
- Erster Versuch einer vollständigen Architektur-Dokumentation
- Erste Java-Klassen, Body-Interface
- Der Roboter macht seine ersten (in perl hart-codierten) Kniebeugen
- Servo-Boards fertiggestellt
- Roboter-Körper mit Aktoren
Juli 2005: Projektstart
Mitte/Ende 2005:
- Erster Versuch einer vollständigen Architektur-Dokumentation
- Erste Java-Klassen, Body-Interface
- Der Roboter macht seine ersten (in perl hart-codierten) Kniebeugen
- Servo-Boards fertiggestellt
- Roboter-Körper mit Aktoren
Juli 2005: Projektstart
|
|
|