| roboShock.de |
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
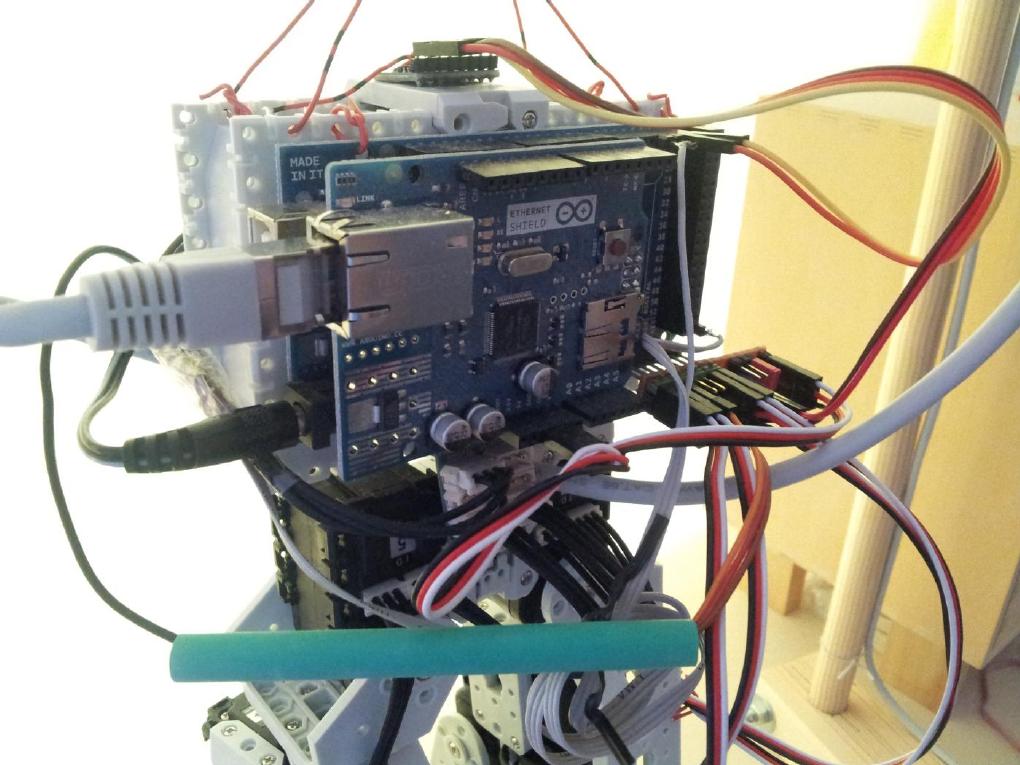
HardwareMy proof-of-concept project is to make a two-legged robot walk safely.Connection to the PCThe connection to the PC looks like this: The sensors are polled each 20 ms. Data volume example: If we have 12 scalar sensor inputs
plus 10 servo positions (as pseudo sensor input) and 16 bit values, this gives a data volume
of 22 * 2 * 50 bytes per second. This is around 8 MB per hour, or 23 GB per year, if the robot is conscious
8 hours per day. So the data volume created by 20 ms sensor polls is easily managable,
even if it sounds frightening at first.
The sensors are polled each 20 ms. Data volume example: If we have 12 scalar sensor inputs
plus 10 servo positions (as pseudo sensor input) and 16 bit values, this gives a data volume
of 22 * 2 * 50 bytes per second. This is around 8 MB per hour, or 23 GB per year, if the robot is conscious
8 hours per day. So the data volume created by 20 ms sensor polls is easily managable,
even if it sounds frightening at first.
Sensors- 4 pressure sensors, at each foot one in the front and one in the rear.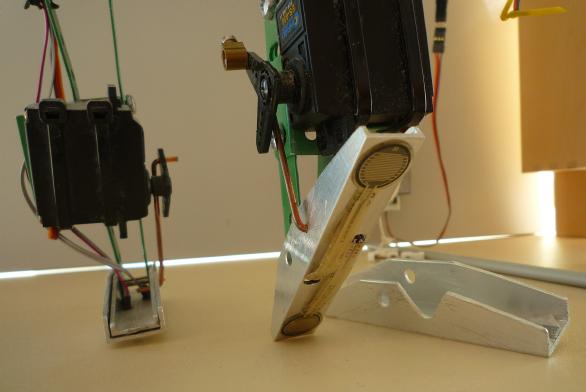
- two 1-axis tilt sensors 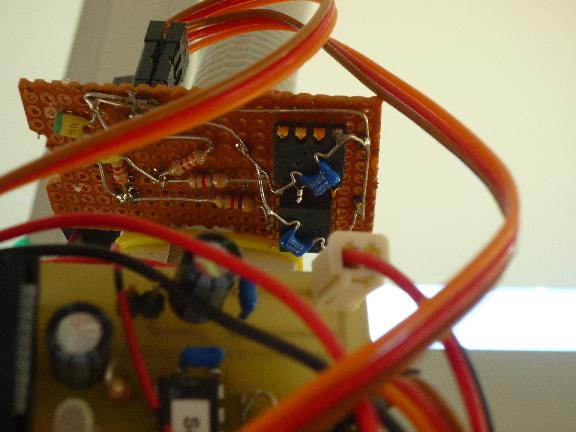
- two 3-axis accelerometers (not connected yet - just not enough time) Holding FrameThe robot is connected to a holding frame via 4 ropes. With the big servo you see in the lower right edge of the frame these ropes can be loosened to give the robot real free standing conditions, or pulled to linger a fall, and also to bring the robot back into a starting position similar like rearranging the bowling pins on an automated bowling alley.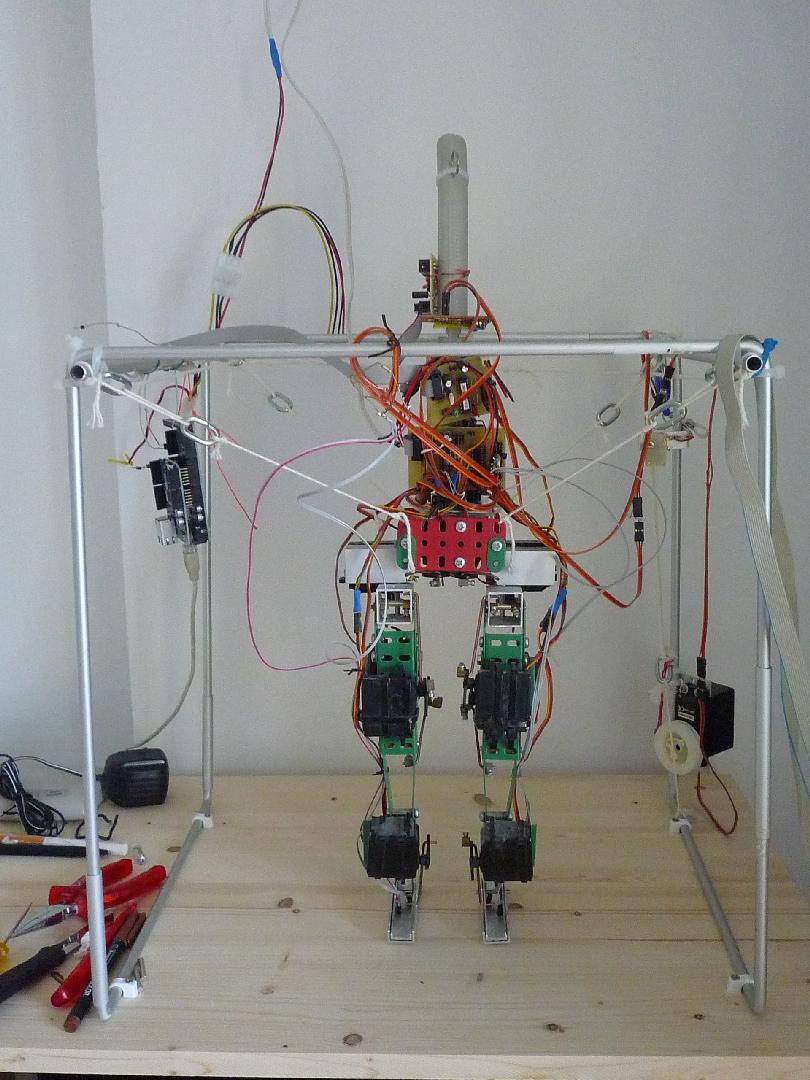
New robot - Nov. 2013I am building a new robot body based on the bioloid comprehensive kit wit AX-12 digital servos. Here is a first picture. (No sensors connected until now.)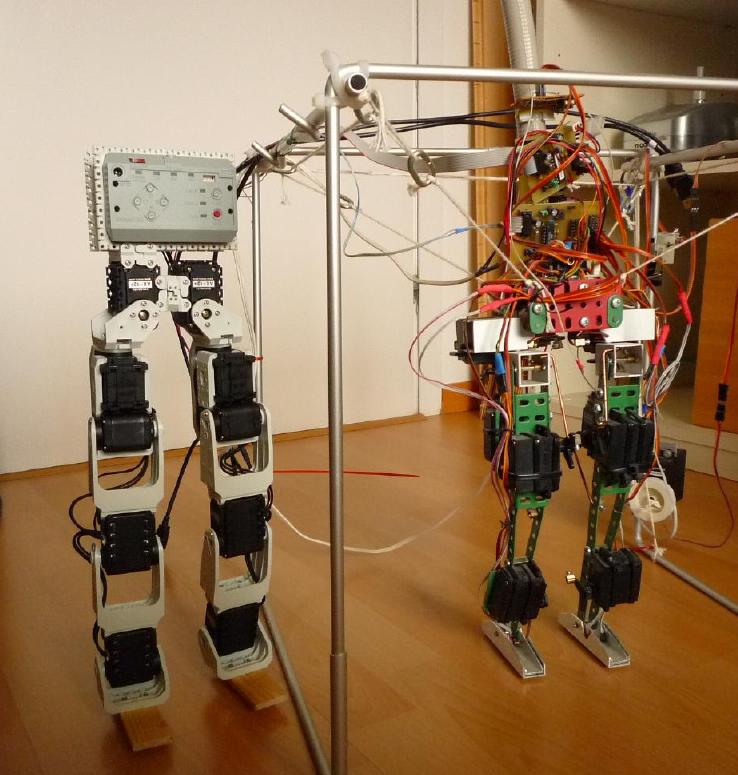
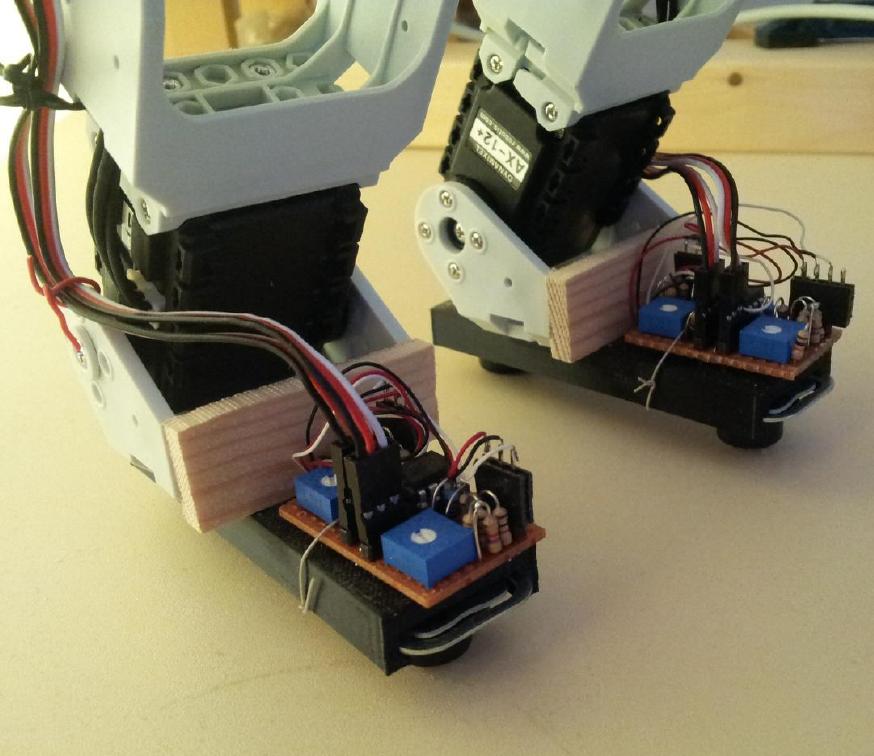
New robot - now with sensorsOn the top there is a MPU-6050 3-achse gyro an 3-achse accelerometer. The feet have 2 force sensors each. I got all 4 force sensors from one single Voltcraft scale, as each foot of the scale has its own force sensor.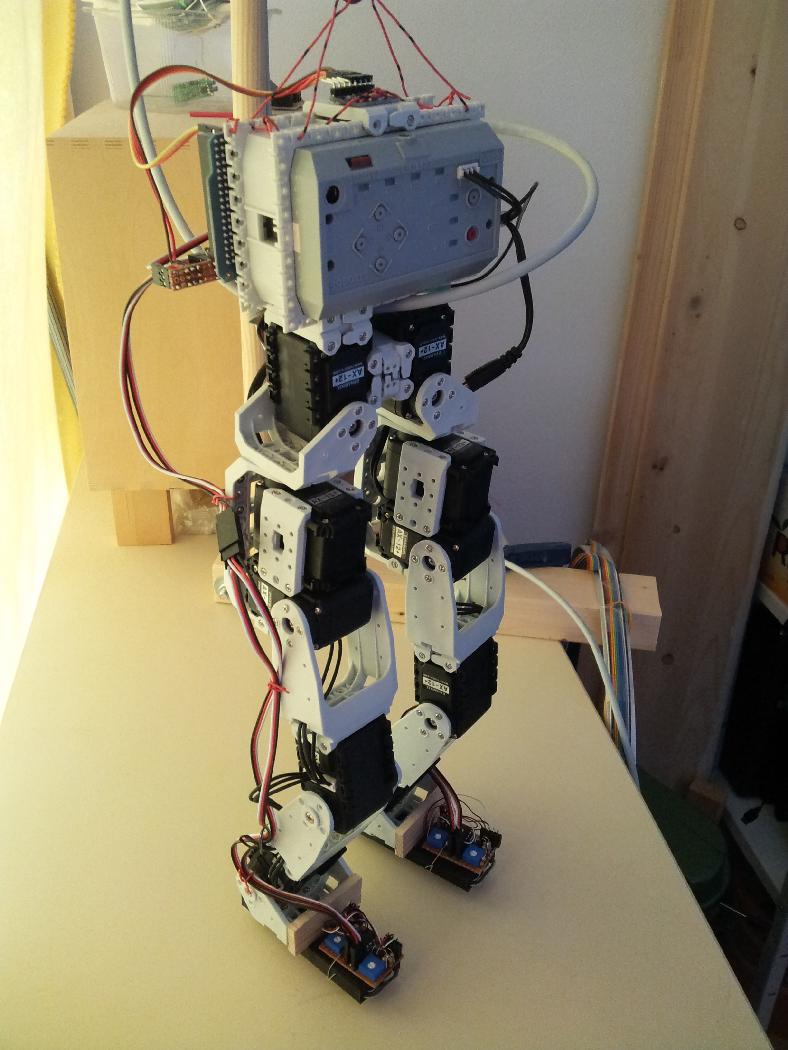
|
(c) Copyright 2012-2016 Thomas Schütt